De Plateforme I2RM - Imagerie Interventionnelle et Robotique Médicale
Aller à la navigation
Aller à la recherche
Version du 2 juin 2017 à 15:28
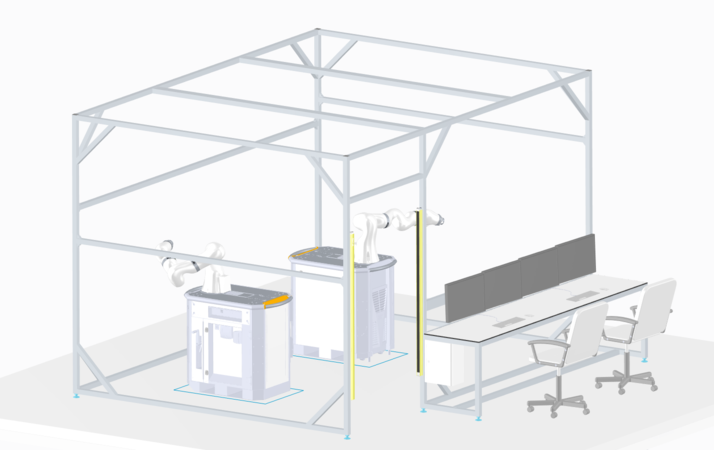
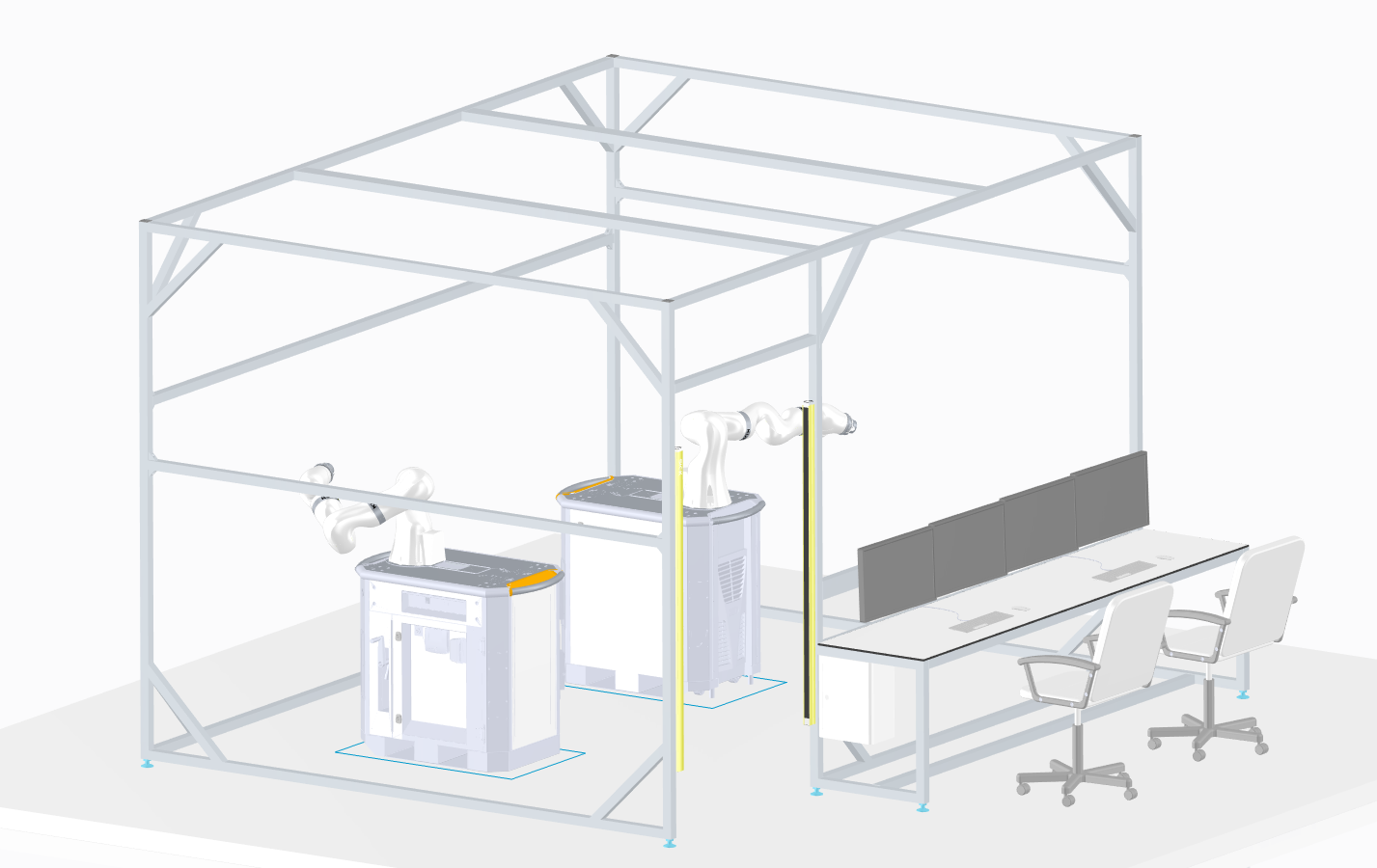
Cellule Collaborative
Acquisition dans le cadre d'un financement IDEX par l'Université de Strasbourg et un projet INS2I R2H.
Vue CAO de la cellule robotique
Bras robotiques collaboratifs
- Deux bras robotique KUKA LBR IIWA R820 (documentation File:Spez_LBR_iiwa_en.pdf) montés sur deux bases mobiles passives FlexFELLOW
| LBR IIWA 14 R820
|
|
|
| Charge |
14kg
|
| Portée Max. |
820 mm
|
| Nombre d'axes pouvant être commandés |
7
|
| Répétabilité |
+/- 0,15 mm
|
| Poids |
30 kg
|
| Contrôleur |
KUKA Sunrise Cabinet
|
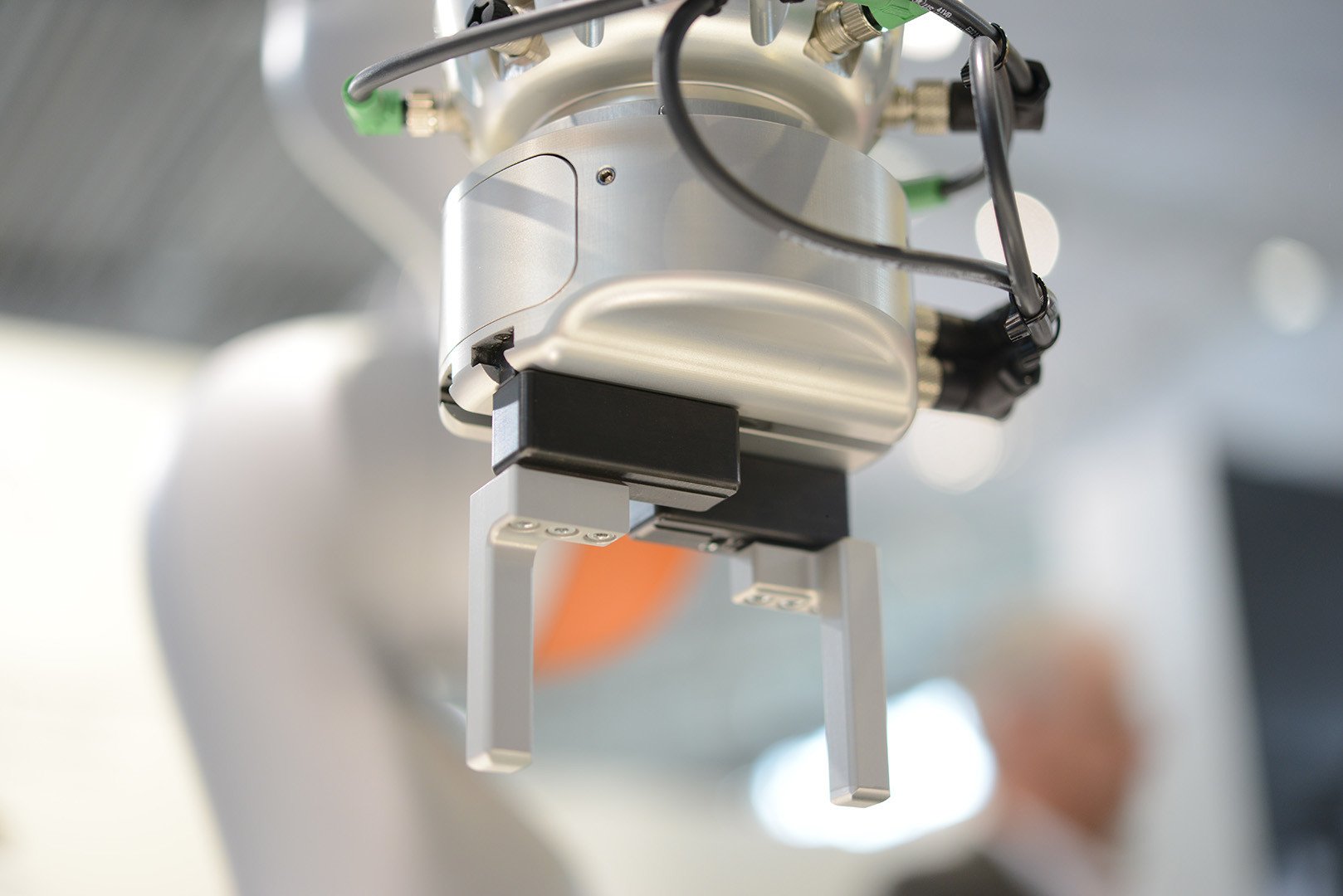
- Les deux bras peuvent être équipés de préhenseur (LBR R800 Sensitive Gripper, documentation File:KUKA_LBRGreifer_ENUS.pdf) développés par l'entreprise Zimmer en collaboration avec KUKA.
| LBR R800 Sensitive Gripper
|
|
|
| Mediaflange |
Electrique
|
| Poids |
900 g
|
| Course max. |
40 mm
|
| Vitesse max. |
60 mm/s
|
| Modes |
Position, vitesse et force
|
| Contrôle en force |
de 70 à 1250 N
|
Capteurs
- Capteurs de mouvement inertiels : 6 capteurs inertiels (MTw Awinda) avec centrale d'acquisition de la société Xsens
- Caméras 3D : 4 caméras 3D Orbbec 720p avec accessoires
Systèmes informatiques
- Casque de réalité virtuelle HTC Vive
- Stations informatiques : 3 stations équipées Sunrise Workbench (KUKA),
- Développement contrôle-commande sur bus EtherCAT (Pile EtherCAT Acontis et logiciel de configuration du bus)
Robots
| Caractéristiques |
ViperS650 |
Mitsubishi RV1A |
SINTERS |
Platine XY Nanomotion |
Tourelle Pan/Tilt
|
| Nombre d'axes |
6 |
6 |
6 |
2 |
2
|
| Débattements articulaires |
Axe 1 : ±170°
Axe 2 : -190° à +45°
Axe 3 : -29° à +256°
Axe 4 : ±190°
Axe 5 : ±120°
Axe 6 : ±360°
|
Axe 1 : ±170°
Axe 2 : -60° à +120°
Axe 3 : +60° à +155°
Axe 4 : ±160°
Axe 5 : ±90°
Axe 6 : ±200°
|
Texte de la cellule |
Axe 1 : 0 à 100 mm
Axe 2 : 0 à 100 mm
|
Texte de la cellule
|
| Vitesses articulaires |
Axe 1 : 328°/s
Axe 2 : 300°/s
Axe 3 : 375°/s
Axe 4 : 375°/s
Axe 5 : 375°/s
Axe 6 : 600°/s
|
Axe 1 : 180°/s
Axe 2 : 90°/s
Axe 3 : 135°/s
Axe 4 : 180°/s
Axe 5 : 180°/s
Axe 6 : 210°/s
|
Texte de la cellule |
Axe 1 : 250mm/s
Axe 2 : 250mm/s
|
|
| Répétabilité |
±0,020 mm |
±0,020 mm |
Texte de la cellule |
Texte de la cellule |
Texte de la cellule
|
| Charge max |
2,5 kg (nominal); 5 kg (max) |
1,0 kg (nominal); 1,5 kg (max) |
Texte de la cellule |
Texte de la cellule |
Texte de la cellule
|
| Espace atteignable |
653 mm |
418 mm |
Texte de la cellule |
100mm x 100 mm |
Texte de la cellule
|
| Freins |
Axes 2 à 6 |
Axes 1 à 3 et 5 |
Aucun |
Aucun |
Aucun
|
Interfaces haptiques
|
|
Omega.3
|
Omega.7
|
Falcon
|
Phantom 1.5/6DOF
|
| Société |
Force Dimension |
Force Dimension |
NOVINT |
Sensable Technologies (Geomagic)
|
| Quantités |
1 |
2 |
1 |
1
|
| Nombre de degrés de liberté |
3 (3 actives) |
7 (3 T actives, 3 R passives et saisie active) |
3 (3 actives) |
6 (6 actives)
|
| Bus communication |
USB |
USB |
USB |
port parallèle
|
| Gamme d'efforts |
12 N |
- translation 12,0 N
- saisie ± 8,0 N
|
|
12 N (1/320 N)
|
| Espace de travail |
cylindre diamètre 160 mm longueur 110 mm |
- translation cylindre diamètre 160 mm longueur 110 mm
- rotation 240 x 140 x 180 deg
- saisie 25 mm
|
100x100x100 mm
|
- translation 381x267x191 mm
- Yaw/Pitch/Roll 297/260/335 deg
|
| Résolution |
< 0.01 mm |
- translation < 0.01 mm
- rotation 0.09 deg
- saisie 0.006 mm
|
0,065mm |
- translation < 0,03 mm
- Yaw/Pitch/Roll 0.0025/0.0025/0.008 deg
|