Organigramme
Aller à la navigation
Aller à la recherche
Les décisions sont prises en concertation et en étroite interaction avec l'équipe AVR (P. Renaud)
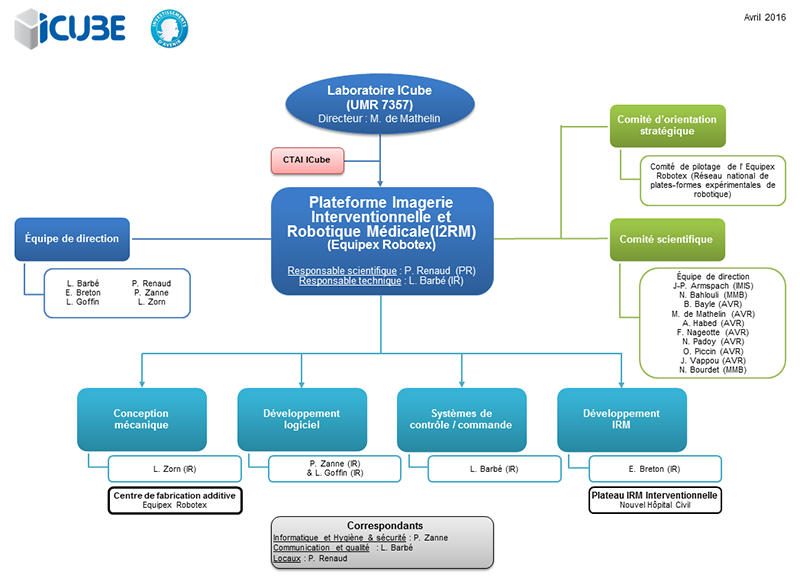
Organigramme de la plateforme - Avril 2016
Responsable scientifique :
Pierre Renaud, Professeur des Universités
Responsable technique :
Laurent Barbé, Ingénieur de Recherche