Robotique
Révision datée du 21 février 2018 à 09:39 par Barbe (discussion | contributions)
- en cours de construction -
Responsable : Laurent Barbé
Le pôle Robotique de la plateforme IRIS a pour vocation le développement et la mise en œuvre de solutions d'aide aux gestes médicaux et chirurgicaux, en offrant un service et des moyens en conception :
- de pièces et systèmes robotiques
- des logiciels pour piloter ces systèmes
Systèmes robotiques
Le pôle Robotique offre des moyens expérimentaux et une expertise
Cellule Collaborative
Acquisition dans le cadre d'un financement IDEX par l'Université de Strasbourg et un projet INS2I R2H. La procédure pour l'utilisation du robot est donnée dans le document suivant : File:ConsignesUtilisationCelluleRobotiqueKUKA_2017.docx
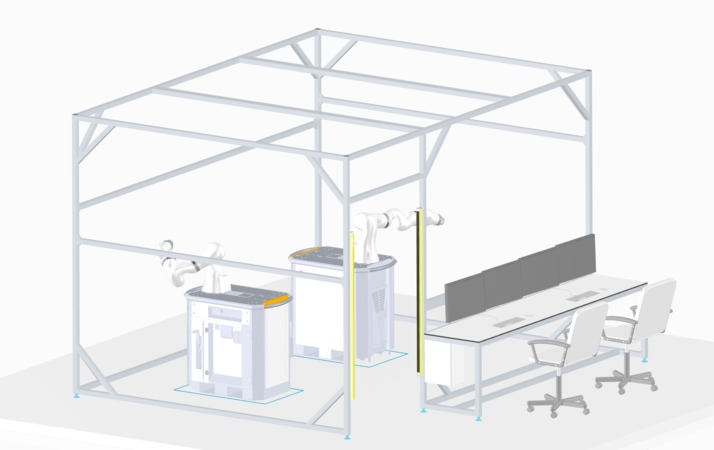
Vue CAO de la cellule robotique
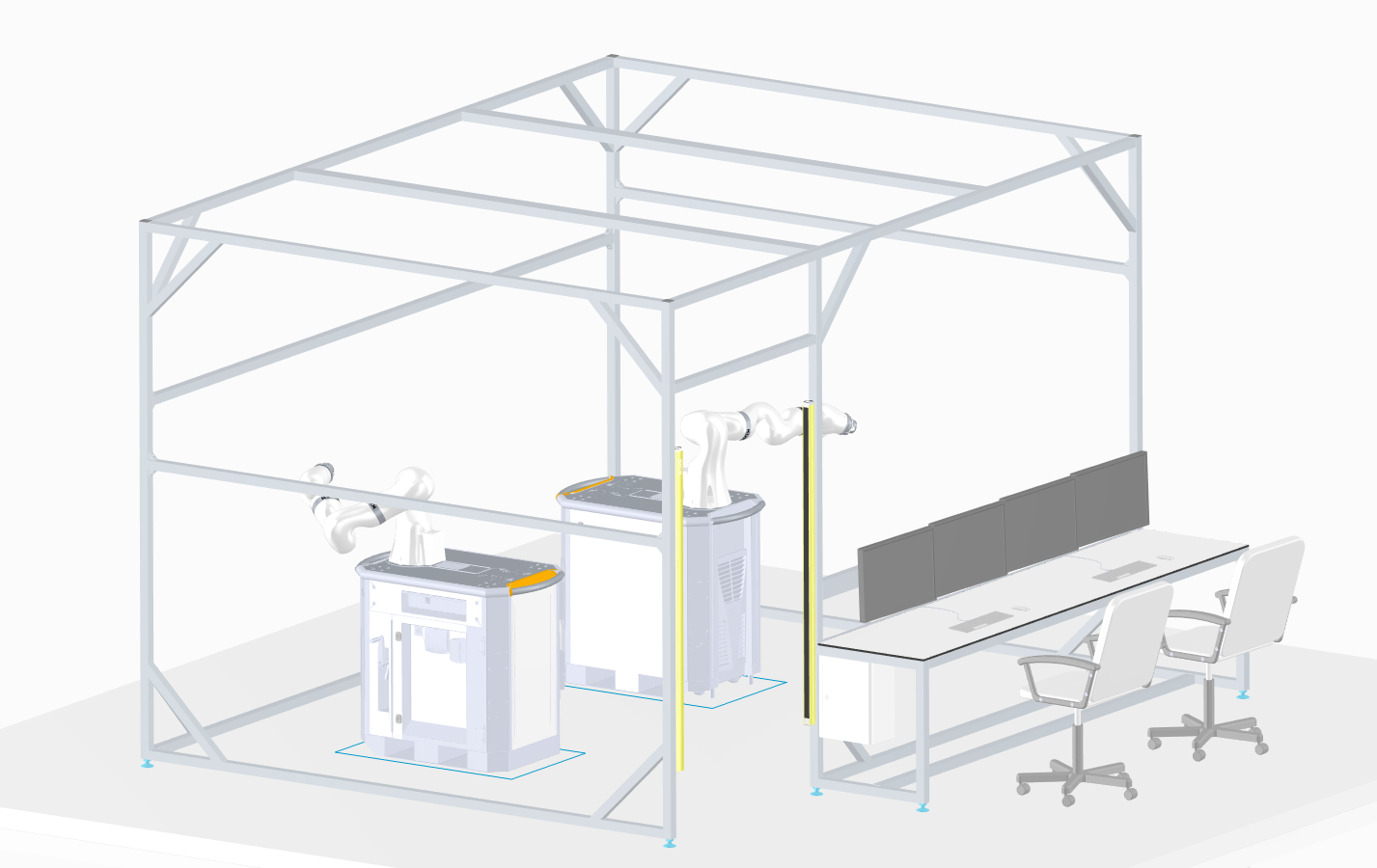
Bras robotiques collaboratifs
- Deux bras robotique KUKA LBR IIWA R820 (documentation File:Spez_LBR_iiwa_en.pdf) montés sur deux bases mobiles passives FlexFELLOW
| LBR IIWA 14 R820 |
| |
|---|---|---|
| Charge | 14kg | |
| Portée Max. | 820 mm | |
| Nombre d'axes pouvant être commandés | 7 | |
| Répétabilité | +/- 0,15 mm | |
| Poids | 30 kg | |
| Contrôleur | KUKA Sunrise Cabinet |

- Les deux bras peuvent être équipés de préhenseur (LBR R800 Sensitive Gripper, documentation File:KUKA_LBRGreifer_ENUS.pdf) développés par l'entreprise Zimmer en collaboration avec KUKA.
| LBR R800 Sensitive Gripper |
| |
|---|---|---|
| Mediaflange | Electrique | |
| Poids | 900 g | |
| Course max. | 40 mm | |
| Vitesse max. | 60 mm/s | |
| Modes | Position, vitesse et force | |
| Contrôle en force | de 70 à 1250 N |

Capteurs
- Capteurs de mouvement inertiels : 6 capteurs inertiels (MTw Awinda) avec centrale d'acquisition de la société Xsens
- Caméras 3D : 4 caméras 3D Orbbec 720p avec accessoires
Systèmes informatiques
- Casque de réalité virtuelle HTC Vive
HTC Vive
- Stations informatiques : 3 stations équipées Sunrise Workbench (KUKA),
- Développement contrôle-commande sur bus EtherCAT (Pile EtherCAT Acontis et logiciel de configuration du bus)
Robots
| Caractéristiques | ViperS650 | Mitsubishi RV1A | SINTERS | Platine XY Nanomotion | Tourelle Pan/Tilt |
|---|---|---|---|---|---|
| Nombre d'axes | 6 | 6 | 6 | 2 | 2 |
| Débattements articulaires |
Axe 1 : ±170° Axe 2 : -190° à +45° Axe 3 : -29° à +256° Axe 4 : ±190° Axe 5 : ±120° Axe 6 : ±360° |
Axe 1 : ±170° Axe 2 : -60° à +120° Axe 3 : +60° à +155° Axe 4 : ±160° Axe 5 : ±90° Axe 6 : ±200° |
Texte de la cellule |
Axe 1 : 0 à 100 mm Axe 2 : 0 à 100 mm |
Texte de la cellule |
| Vitesses articulaires |
Axe 1 : 328°/s Axe 2 : 300°/s Axe 3 : 375°/s Axe 4 : 375°/s Axe 5 : 375°/s Axe 6 : 600°/s |
Axe 1 : 180°/s Axe 2 : 90°/s Axe 3 : 135°/s Axe 4 : 180°/s Axe 5 : 180°/s Axe 6 : 210°/s |
Texte de la cellule |
Axe 1 : 250mm/s Axe 2 : 250mm/s |
|
| Répétabilité | ±0,020 mm | ±0,020 mm | Texte de la cellule | Texte de la cellule | Texte de la cellule |
| Charge max | 2,5 kg (nominal); 5 kg (max) | 1,0 kg (nominal); 1,5 kg (max) | Texte de la cellule | Texte de la cellule | Texte de la cellule |
| Espace atteignable | 653 mm | 418 mm | Texte de la cellule | 100mm x 100 mm | Texte de la cellule |
| Freins | Axes 2 à 6 | Axes 1 à 3 et 5 | Aucun | Aucun | Aucun |
Interfaces haptiques
| Omega.3 | Omega.7 | Falcon | Phantom 1.5/6DOF | |
|---|---|---|---|---|
| Société | Force Dimension | Force Dimension | NOVINT | Sensable Technologies (Geomagic) |
| Quantités | 1 | 2 | 1 | 1 |
| Nombre de degrés de liberté | 3 (3 actives) | 7 (3 T actives, 3 R passives et saisie active) | 3 (3 actives) | 6 (6 actives) |
| Bus communication | USB | USB | USB | port parallèle |
| Gamme d'efforts | 12 N |
|
12 N (1/320 N) | |
| Espace de travail | cylindre diamètre 160 mm longueur 110 mm |
|
100x100x100 mm |
|
| Résolution | < 0.01 mm |
|
0,065mm |
|