Différences entre les versions de « Systèmes d’acquisition et mesure temps-réel »
Aller à la navigation
Aller à la recherche
| Ligne 28 : | Ligne 28 : | ||
!scope=col| | !scope=col| | ||
| rowspan="8" style="text-align: center;" | | | rowspan="8" style="text-align: center;" | | ||
| − | <gallery> | + | <gallery mode="packed-hover" heights="200px"> |
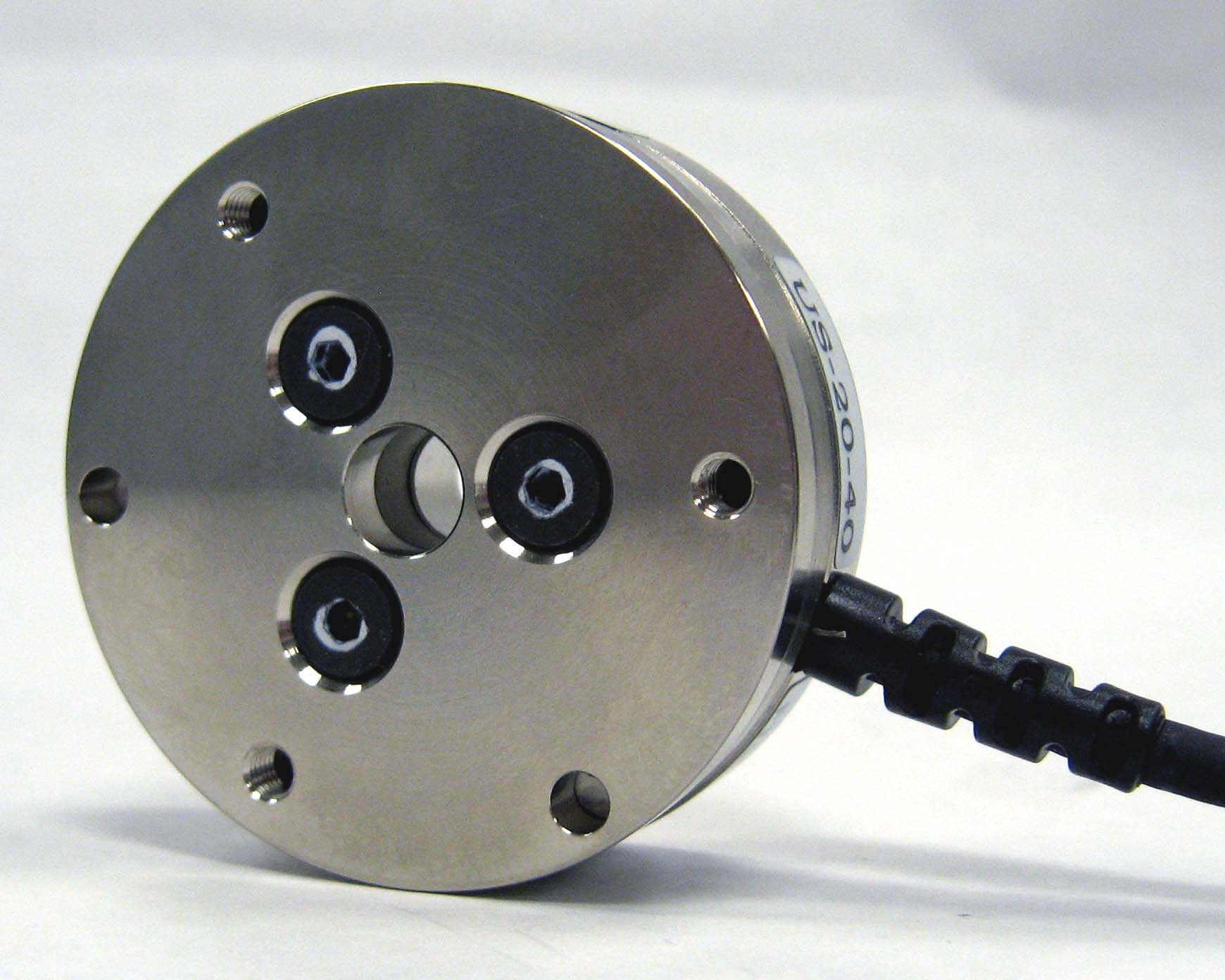
| − | Fichier:24443-10421471.jpeg|Capteur d'efforts ATI | + | Fichier:24443-10421471.jpeg|Capteur d'efforts ATI Nano17 |
</gallery> | </gallery> | ||
|- | |- | ||
Version du 1 juin 2017 à 11:17
Capteurs d'efforts
- Capteur Mini 40 ATI Industrial Automation avec électronique sur bus EtherCAT ( documentation File:ATI_EtherCAT.pdf)
| FTE-MINI40-E-5-EC8-ECAT-0 |
| |
|---|---|---|
| Bus communication | EtherCAT | |
| Nombre de degrés de liberté | 6 | |
| échelle de mesure Fx,Fy (résolution) | 20 N (1/200 N) | |
| échelle de mesure Fz (résolution) | 60 N (1/100 N) | |
| échelle de mesure Tx,Ty (résolution) | 1 Nm (1/8000 Nm) | |
| échelle de mesure Tz (résolution) | 1 Nm (1/8000 Nm) |
- Capteur Nano 17 ATI Industrial Automation avec électronique sur bus EtherCAT ( documentation File:ATI_EtherCAT.pdf)
| FTD-NANO17-E-5-EC8-ECAT-0 |
| |
|---|---|---|
| Bus communication | EtherCAT | |
| Nombre de degrés de liberté | 6 | |
| échelle de mesure Fx,Fy (résolution) | 12 N (1/320 N) | |
| échelle de mesure Fz (résolution) | 17 N (1/320 N) | |
| échelle de mesure Tx,Ty (résolution) | 120 mNm (1/64 mNm) | |
| échelle de mesure Tz (résolution) | 120 mNm (1/64 mNm) |
