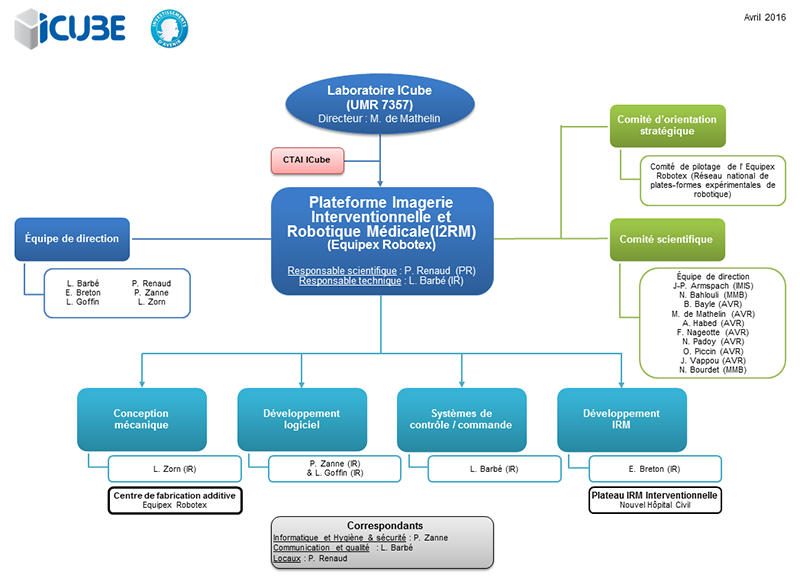
Organigramme
Révision datée du 15 juin 2017 à 14:19 par Pimmel (discussion | contributions)
Les décisions sont prises en concertation et en étroite interaction avec l'équipe AVR (P. Renaud)
Organigramme
Responsable scientifique :
Thomas Noël, Professeur des Universités
Responsable technique :
Guillaume Schreiner, Ingénieur d'Études