Différences entre les versions de « Organigramme »
Aller à la navigation
Aller à la recherche
| Ligne 1 : | Ligne 1 : | ||
| − | |||
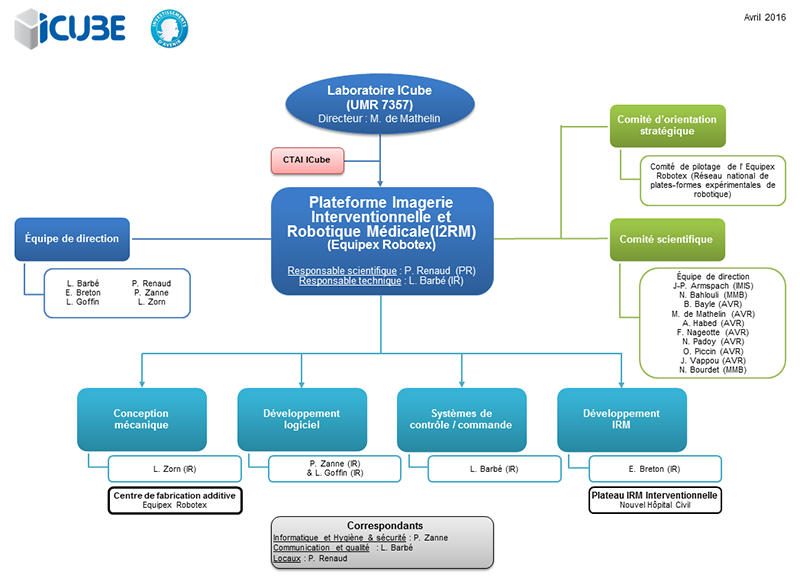
Les décisions sont prises en concertation et en étroite interaction avec l'équipe AVR (P. Renaud) | Les décisions sont prises en concertation et en étroite interaction avec l'équipe AVR (P. Renaud) | ||
=== Organigramme === | === Organigramme === | ||
[[File:Organigramme_2016_v20-I2RM.PNG|800px]] | [[File:Organigramme_2016_v20-I2RM.PNG|800px]] | ||
| + | |||
| + | |||
| + | '''Responsable scientifique :'''<br /> | ||
| + | Thomas Noël, Professeur des Universités<br /> | ||
| + | '''Responsable technique :'''<br /> | ||
| + | Guillaume Schreiner, Ingénieur d'Études<br /> | ||
Version du 15 juin 2017 à 14:19
Les décisions sont prises en concertation et en étroite interaction avec l'équipe AVR (P. Renaud)
Organigramme
Responsable scientifique :
Thomas Noël, Professeur des Universités
Responsable technique :
Guillaume Schreiner, Ingénieur d'Études