De Plateforme IRIS : Imagerie, Robotique et Innovation en Santé
Aller à la navigation
Aller à la recherche
| Dof |
Mouvement |
Débattement
|
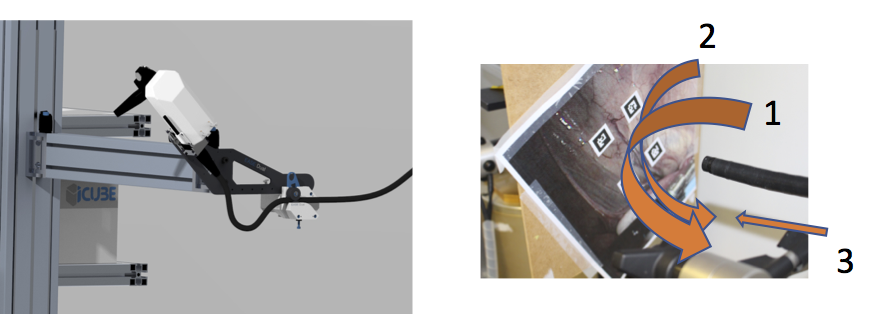
Endoscope Robotisé - 3 D.O.F
|
| 1 |
Flexion L/R |
[-90°,90°]
|
| 2 |
Flexion U/D |
[-90°,+90°]
|
| 3 |
Translation |
[0,150] mm
|
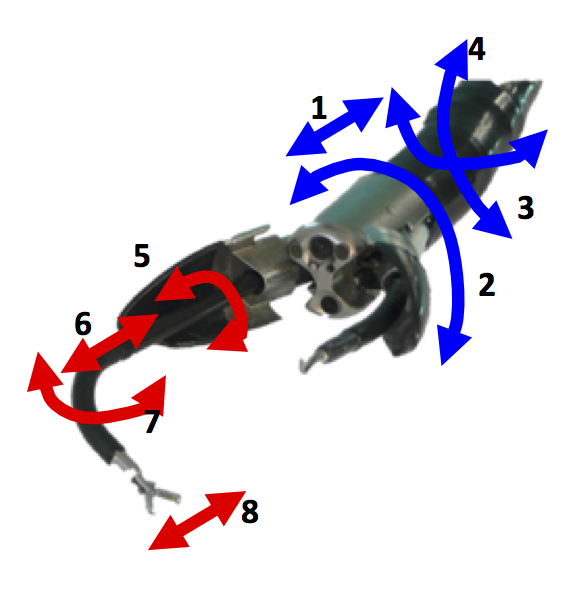
- Cellule STRAS : Robot continu téléoperé pour la chirurgie endo et trans luminale
STRAS - Système esclave
| Sous Système
|
D.D.L
|
Mouvement
|
Partie Distal
|
|
| Débattement
|
Vitesse
|
Force
|
| Instrument |
7 |
Flexion |
[-90°,+90°] |
0.5s pour 180° |
0.9N
|
| 5 |
Rotation |
Infinie |
0.7s pour 180° |
4N
|
| 6 |
Translation |
[0,75] mm |
1s pour 75mm |
20N
|
| 8 |
Pince |
[0°,+60°] |
0.5s pour 60° |
3N
|
| Endoscope |
3 |
Flexion (L/R) |
[-90°,+90°] |
1.5s pour 180° |
NA
|
| 4 |
Flexion (U/D) |
[-90°,+90°] |
1.5s pour 180° |
NA
|
| Berceau |
2 |
Rotation |
[-90°,+30°] |
1.0s pour 30° |
NA
|
| 1 |
Translation |
[0,+100] mm |
1.7s pour 100mm |
NA
|
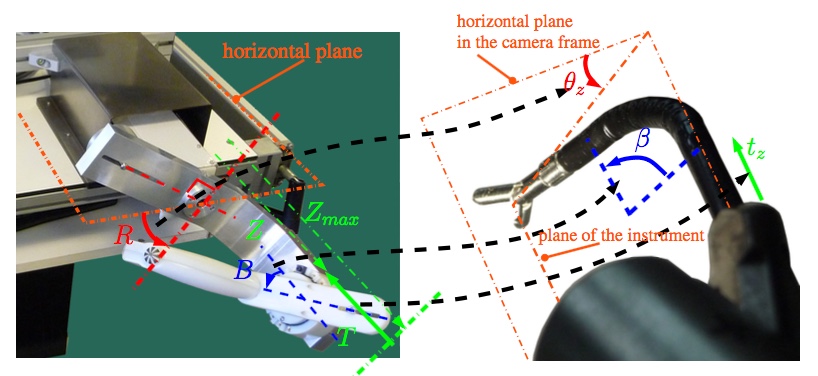
STRAS - Système maitre
| Dof |
Mouvement |
Débattement
|
|
| T |
Translation |
[0,90] mm
|
| B |
Rotation (pour flexion) |
[-45°,+45°]
|
| R |
Rotation (autour de l'axe horizontal |
[-160°,160°]
|